脉冲测距 vs 相位测距:哪种更适合你的应用?
当你在选购或设计激光测距系统时,最容易遇到的疑问是:到底该选“脉冲测距”还是“相位测距”? 两种方式都能实现激光测距,但在原理、精度、成本、抗干扰能力上存在明显差异。选错方向,轻则测距不稳,重则方案失败。
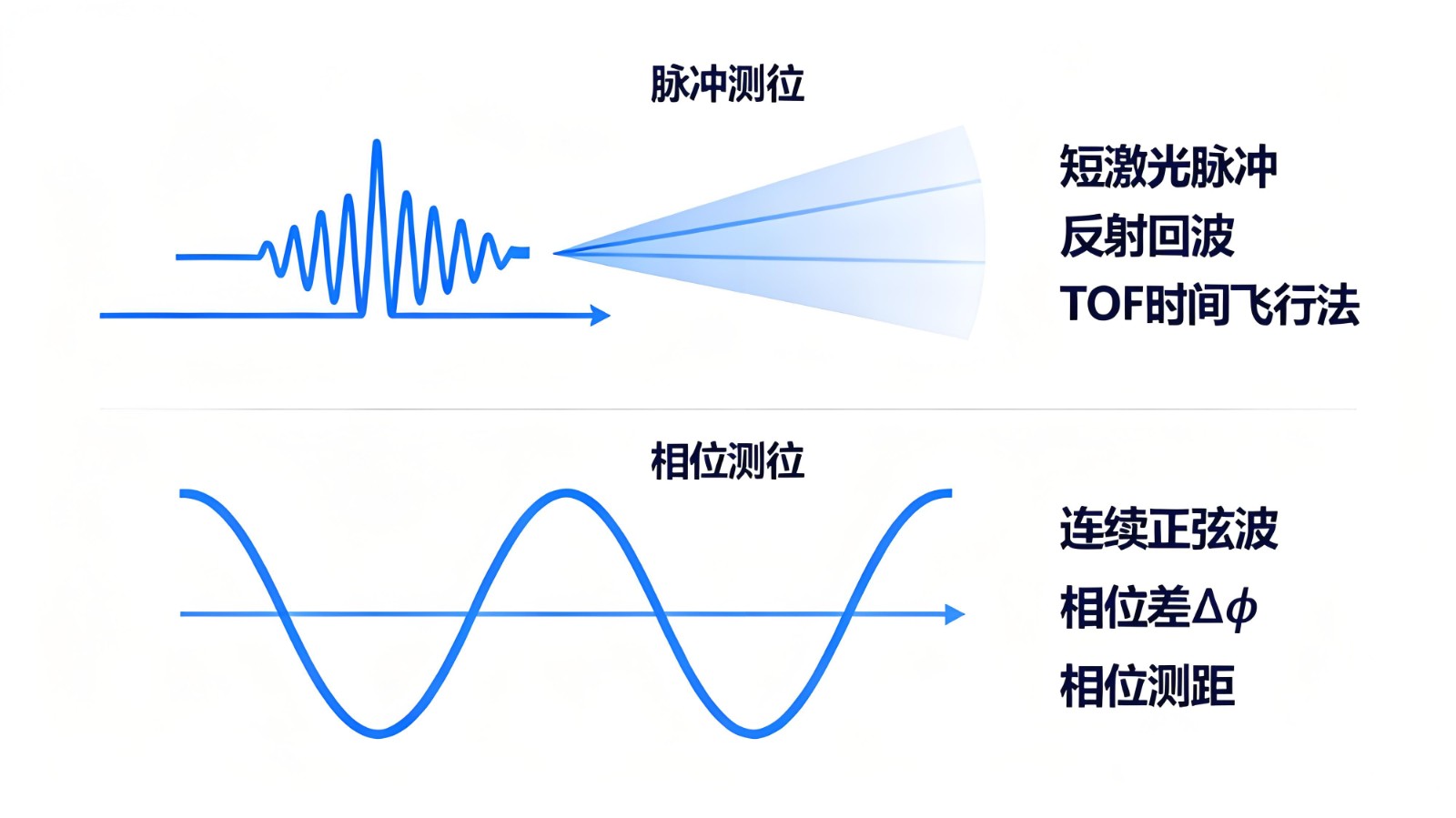
一、两种测距原理的核心差异
| 项目 | 脉冲测距(Pulse TOF) | 相位测距(Phase Ranging) |
|---|
| 测距原理 | 测量激光往返飞行时间(Time of Flight) | 比较发射与接收信号的相位差 |
| 典型光源 | 脉冲激光(1535 nm / 905 nm) | 连续调制激光(AMCW 调制) |
| 精度 | ±1 m ~ ±0.1 m | ±1 mm ~ ±10 mm |
| 测程 | 1 km ~ 10 km(长距离) | ≤ 100 m(短距离) |
| 抗干扰能力 | 强,适合户外强光环境 | 弱,易受背景光影响 |
| 系统复杂度 | 中等,易于封装 | 高,需稳定解调电路 |
| 应用场景 | 无人机、吊舱、测绘、车载防撞 | 工业定位、短距检测、室内测量 |
二、为什么长距离测距普遍采用脉冲方式
脉冲测距基于 TOF(Time of Flight, 飞行时间法),通过测量激光往返时间计算距离:
D = (c × t) / 2
其中:D 为测量距离,c 为光速(3×10⁸ m/s),t 为激光往返时间。
现代脉冲模块(如 1535 nm 人眼安全激光测距模块 SFB5000L)已实现:
测程 ≥ 6 km
精度 ≤ ±1 m
支持首末目标识别、多目标测距、距离选通
工作温度 -40 ℃ ~ +60 ℃
三、相位测距的优势与局限
相位法测距通过调制连续波信号并比较相位差:
D = (c × Δφ) / (4 × π × f)
其中:D 为测量距离,c 为光速,Δφ 为相位差,f 为调制频率。
其优势是分辨率高,可达毫米级,常用于精密定位、工业检测、室内导航等场景。
但受限于调制频率、光源稳定性及环境噪声,最大测程通常不超过 100 m。
四、选型建议:按距离与环境决策
| 应用类型 | 建议测距方式 | 推荐技术路线 |
|---|
| 无人机、吊舱、车载光电系统 | 脉冲测距 | 1535 nm 单脉冲 TOF 模块 |
| 工业机器人定位(室内) | 相位测距 | AMCW 或 FMCW 方案 |
| 测绘巡检、测距望远镜 | 脉冲测距 | 905 nm / 1535 nm 激光模组 |
| 实验室精密位移检测 | 相位测距 | 多频相位干涉测距系统 |
简单记忆:远距用脉冲,近距用相位。
五、未来趋势:融合式测距正在兴起
“脉冲 + 相位融合”方案正逐渐流行,兼顾远距覆盖与近距高精度。
该方案已在车载激光雷达和测绘吊舱中落地,成为新一代测距技术方向。
六、结语
没有绝对更好的测距方式,只有更匹配的方案。
对于复杂户外环境、无人系统与光电平台,脉冲式 1535 nm 激光测距模块仍是当前最稳定、性价比最高的选择。
延伸阅读: